
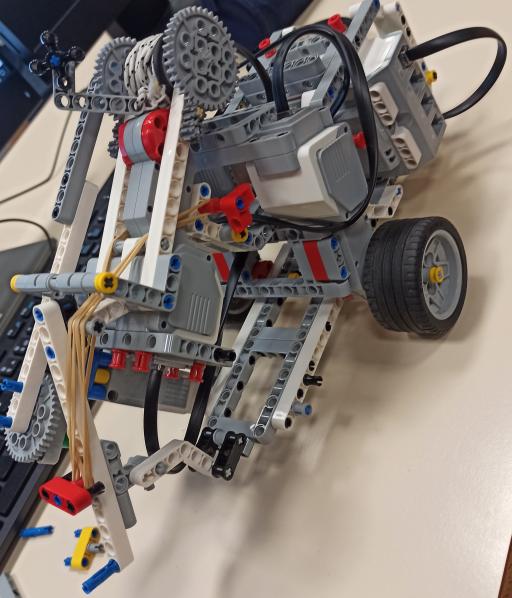
Le but du projet NXT de cette année était de créer un robot « sous-marin » devant réaliser plusieurs tâches :
– hélitreuiller le robot vers la cité de R’Lyeh
– Effectuer un suivi de ligne en évitant les obstacles
– Faire « paniquer » le robot et afficher un message SOS sur le boitier.
1) Brainstorming
On a d’abord réfléchi sur la façon dont nous allions aborder les étapes, c’est-à-dire transcrire les informations à nos dispositions en commandes effectuables sur le robot.
La répartition des tâches c’est faite en deux groupes:
– Un groupe qui s’occupe de la construction ainsi que la programmation du robot
– un autre qui s’est chargé de l’analyse des étapes et du script affiché sur le boitier.
Etape 1:
Le robot va devoir propulser un grappin qui sera intégré à la structure pour s’accrocher à une cible éloignée et s’attirer à elle.
Etape 2:
Le robot va devoir suivre une ligne blanche avec des virages avec l’aide de capteurs de couleurs (en l’occurrence blanche).
Etape 3:
Le robot va devoir effectuer des mouvements aléatoires et afficher sur le boitier un SOS: « Alerte intégrité structurel menacée, S-O-S ! »
2) Répartition des tâches
La fabrication du sous-marin a été effectuée par Hugo Schott et Paul Blondet.
La programmation a quand à elle été effectuée par Gaëtan Schuler et Hugo S.
Le script a été rédigé par Arthur Richart.
Le montage et la rédaction de l’article a été fait par Jérémy Poujaud.
A la direction artistique, choix des musiques par Arthur Richart et montage par Jérémy Poujaud.
Lien de notre Vidéo complète :